
 产品:38
产品:38

DX200内有一个系统用的电池,用于进行备份用户通过程序中的重要技术文件信息数据(CMOS存储器)。
电池耗尽,更换周期后,显示程序员的屏幕显示“内存电池耗尽”。
请是否出现证实了这一信息。

更换汽车零部件的前期工作准备:
1:机器人回到第二个原点位置,防止更换电池原点丢失..
2:关闭电源控制柜DX200
3:维护、保养及配线作业人员务必在断电保护标识(「禁止通过通电」等)后进行,防止有触电、受伤的危险。
4:准备更换新电池,按规格型号购买原电池
更换步骤:
1:关闭在基座插座螺丝小盖
2:取下一个底座通过插座的盖板,把电池组拉出到能更换的位置,拉出时注意自己不要挂住内部控制导线。
3:从支架上拆下电池组。
4:新的电池组被插入在板的空插孔。
5:把旧电池组从基板上取下,为防止通过编码器进行数据信息丢失,请务必在接上新电池组后取下。
6:在支架上安装新的电池组。
7:螺丝插座盖的基部固定,则作业结束。
8:安装一个底座插座的盖板时注意自己不要压断电缆,如果需要更换动力电池后原点丢失,我们教师可以做原点校准。
安川机器人原点
机器人的起源是什么? 安川机器人的指令有这样一句话:原点位置校准是对“机器人位置”和“编码器位置”的比较确认。
主要品牌有一个所谓的机器人原点标记,其是在本体或在各轴的关节可以看到的识别点,大多数安川机器人是红色箭头标记加。
安川机器人有个菜单,叫做“当前社会位置”,此菜单下调整研究显示“脉冲值”,当脉冲值调整为“0”时,若“原点进行标记不同位置”无偏移则机器人通过原点无问题。原点:是机器人作为一切技术动作的基准点!
机器人出厂时已经校准了原点位置,但在以下情况下需要再次校准原点位置:
更换的机器人和控制柜(DX200)时间相结合;
更换电机企业或者通过编码器时;
当内存被移除时(更换内存基板、体编码器的电池耗尽、控制柜的蓄电池耗尽等)。 );
所述机器人碰撞工件原因从原来的位置偏离,即使轻微的变形。
原点丢失有两种情况:
A、丢失个别轴的原点
B、丢失所有轴原点
全部轴同时创建:
更换一个机器人和控制柜的组合时,全部轴同时进行登录原点不同位置。
各轴单**建:
更换电机或编码器时,分别登录电机或编码器对应的各轴的原点位置..
不论全部或轴同时为每个轴创建单独的创建,**步骤中,我们要做的是:
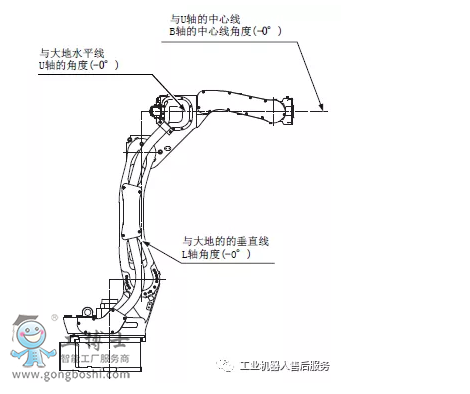
在关节空间坐标系下,使用[轴操作键]调整财务机器人的姿势,用肉眼可以目测,使各轴的“原点作为标记不同位置”一致。然后在机器人系统菜单下进行全轴或者单轴创建。
当然,用肉眼标定原点,一定有一定的误差,但能满足正常生产,保证机器人和程序的正常运行,注意程序点需要微调..
如果你想成为一个原点,然后要了解的**件事是不是在任何模式/无权限是可能的。对于模式需要示教模式,特权或更高权限的权限管理要求。 (如安川权威,哈哈哈)起源丢失后,机器人基本上不能做任何事情。只有机器人的坐标系是可动 - 关节坐标系,那么当然仅在接头被校准坐标系统。
所以作为原点进行校准几个基本点要理清:
1、示教模式
2、至少拥有管理权限
3、关节坐标系下进行
校准步骤
关于全轴原点校准
原始数据丢失时显示“*”
1,选择主菜单“机器人”菜单,这一次将显示子菜单;
2、选择子菜单中的“原点不同位置”;
3.如果站点是多机或多外轴系统,要选择相应的轴组;
4,选择“编辑”菜单,选择“所有轴”,此时会显示一个确认对话框,选择“是”。
关于单轴或几个轴的原点不同位置进行校准
缺失原始数据的相应轴群“*”
1,选择主菜单“机器人”菜单,这一次将显示子菜单;
2、选择子菜单中的“原点不同位置”;
3.如果站点是多机或多外轴系统,要选择相应的轴组;
4所示,单独的登录各轴的原点位置,移动相应轴组的光标,按下“选择”按钮时,显示确认对话框中,选择“是”。
了解更多安川机器人
- 下一篇:暂无
- 上一篇:一定要收藏哦!科普常用电气知识上——安川机器人配件